IC-SHM 2022
The 3rd International Competition for Structural Health Monitoring
(IC-SHM 2022)
![]() Registration Form For IC-SHM.docx
Registration Form For IC-SHM.docx
![]() Announcement-The 3rd International Competition for SHM.pdf
Announcement-The 3rd International Competition for SHM.pdf
Sponsored by:
ANCRiSST (Asian-Pacific Network of Centers for Research in Smart Structure Technology)
College of Civil Engineering, Tongji University, China
Lab of Intelligent Civil Infrastructure, Harbin Institute of Technology, China
Smart Structures Technology Laboratory, University of Illinois at Urbana-Champaign, USA




Welcome
Bridges and construction facilities are indispensable in people's life. Bridges enable people to cross natural or artificial obstacles and meet travel needs. Buildings shelter people from wind and rain, improve production efficiency and meet people's living needs. With time, the demand for repair and maintenance of existing bridges and buildings increases day by day. Therefore, the research on improving the reliability and efficiency of inspection and monitoring methodologies is becoming more meaningful.
Since 2020, The International Health Monitoring Competition has been held successfully two times. The original intention of this competition is to tackle the challenge by fostering and encouraging innovations in the structural health monitoring (SHM) community. During the first two competitions, many excellent monitoring solutions have emerged, opening up new ideas to solve problems, which is what we are most willing to see.
This year, a new competition is launched to further extend the frontiers of structural health monitoring technology. The competition is organized by the Asia-Pacific Network of Centers for Research in Smart Structures Technology (ANCRiSST), Tongji University, Harbin Institute of Technology, and University of Illinois at Urbana-Champaign. All interested students and young scholars from different universities are invited to participate in the competition.
The competition consists of three projects: (i) ship trajectory recognition, (ii) computer vision-based dynamic displacement identification, and (iii) data construction for structural health monitoring. Certificates and cash prizes (1st prize - $1000; 2nd prize - $500; 3rd prize - $300) will be awarded for each of the three project competitions. Participants may take part in one or more projects. We will be publishing the IC-SHM 2022 proceedings online, which will include the papers and presentation videos from contest participants. Papers from winning entries will be recommended for publication in the Journal of Smart Structures and Systems, subject to the Journal’s peer review process.
We warmly welcome you to the competition and wish you good luck in your efforts!
Prof. Limin Sun
Chair of IC-SHM 2022
Changjiang Scholarship Professor
Tongji University, Shanghai, China
Prof. Hui Li
Chair of IC-SHM 2022
Changjiang Scholarship Professor
Harbin Institute of Technology, Harbin, China
Prof. Billie F. Spencer Jr.
Chair of IC-SHM 2022
Nathan M. and Anne M. Newmark Endowed Chair in Civil Engineering
University of Illinois at Urbana-Champaign, Urbana, IL, USA
Advisory Committee
James L. Beck (USA)
Yunmin Chen (China)
Zuyu Chen (China)
Yozo Fujino (Japan)
Vincenzo Gattulli (Italy)
Mark Girolami (UK)
Hong Hao (Australia)
Chan Ghee Koh (Singapore)
Hui Li (China)
Sami F. Masri (USA)
Satish Nagarajaiah (USA)
Jinping Ou (China)
Billie F. Spencer Jr. (USA)
Xilin Lu (China)
Zhishen Wu (Japan, China)
You-lin Xu (Hong Kong SAR, China)
Chung-Bang Yun (Korea)
Awards Committee
Chairs
Billie F. Spencer Jr. | University of Illinois at Urbana-Champaign, USA |
Hui Li | Harbin Institute of Technology, China |
Limin Sun | Tongji University, China |
Secretary
Ye Xia | Tongji University |
Yuequan Bao | Harbin Institute of Technology, China |
Jian Li | University of Kansas |
Members
Eleni N. Chatzi | ETH, Zurich |
Shirley Dyke | Purdue University, USA |
Branko Glisic | Princeton University, USA |
Vedhus Hoskere | University of Houston, USA |
Ying Lei | Xiamen University, China |
Dalian University of Technology, China | |
Tomonori Nagayama | The University of Tokyo, Japan |
Yasutaka Narazaki | ZJU-UIUC Institute, Zhejiang University, China |
Yi-Qing Ni | The Hong Kong Polytechnic University, Hong Kong, China |
Jerome P. Lynch | University of Michigan, USA |
Weixin Ren | Shenzhen University, China |
Hoon Sohn | Korea Advanced Institute of Science and Technology (KAIST), Korea |
Michael Todd | University of California San Diego, USA |
Yong Xia | The Hong Kong Polytechnic University, Hong Kong, China |
Ting-Hua Yi | Dalian University of Technology, China |
Macau University, Macau, China | |
Hongping Zhu | Huazhong University of Science and Technology, China |
Daniele Zonta | University of Trento, Italy |
Ying Zhou | Tongji University, China |
Jun Teng | Harbin Institute of Technology, China |
Chair
Ying Zhou | Tongji University |
Vice-chairs
Yuequan Bao Jian Li Ye Xia | Harbin Institute of Technology, China University of Kansas Tongji University |
Members
Jennifer A. Bridge | University of Florida, USA |
Young-Jin Cha | University of Manitoba, Canada |
Chia-Ming Chang | Taiwan University, Taiwan, China |
Lin Chen | Tongji University, China |
Zhicheng Chen | Harbin Institute of Technology, China |
Yuanfeng Duan | Zhejiang University, China |
Youliang Ding | Southeast University, China |
You Dong | The Hong Kong Polytechnic University, Hong Kong, China |
Tong Guo | Southeast University, China |
Vedhus Hoskere | University of Houston, USA |
Rongrong Hou | Harbin Institute of Technology, China |
Hongwei Huang | Tongji University, China |
Yong Huang | Harbin Institute of Technology, China |
Mohammad R. Jahanshahi | Purdue University, USA |
Hongki Jo | University of Arizona, USA |
Robin Eunju Kim | Hanyang University, Korea |
Qingzhao Kong | Tongji University, China |
Zhilu Lai | The Hong Kong University of Science and Technology (Guangzhou) |
Jun Li | Curtin University, Australia |
Na Li | CCCC Highway Consultants Co., Ltd. |
Shunlong Li | Harbin Institute of Technology, China |
Jose Matos | University of Minho, Portugal |
Fernando Moreu | University of New Mexico, USA |
Yasutaka Narazaki | ZJU-UIUC Institute, Zhejiang University, China |
Hao Sun | Renmin University of China, China |
Jiazeng Shan | Tongji University, China |
Sung-Han Sim | Sungkyunkwan University, Korea |
Mingming Song | Tongji University, China |
Jose Turmo | Technical University of Catalonia (UPC), Spain |
Lei Wang | Changsha University of Science & Technology, China |
Zuocai Wang | Hefei University of Technology, China |
Shiyin Wei | Harbin Institute of Technology, China |
Shun Weng | Huazhong University of Science and Technology, China |
Yang Xu | Harbin Institute of Technology, China |
Dong-Hui Yang | Dalian University of Technology, China |
Yongchao Yang | EIT Institute for Advanced Study,China |
Guogang Ying | Ningbo Langda Engineering Technology Co. Ltd., China |
Hyungchul Yoon | Chungbuk National University, Korea |
Xiaowei Ye | Zhejiang University, China |
Jian Zhang | Southeast University, China |
Jiwei Zhong | China Railway Bridge Science Research Institute, Ltd. |
Xinqun Zhu | University of Technology Sydney, Australia |
Rules
Participants must be full-time undergraduate students, M.S. students, PhD students, or young scholars within three years after obtaining their PhD.
Participation can be by individuals or by teams (each team can have no more than 5 persons).
Participants can compete in one, two or all three projects.
Registration forms must be submitted to ic.shm@tongji.edu.cn by December 15, 2022. A data download link will be opened after registration.
Contest entries must include: (i) codes and a readme file that can reproduce your results; We accept code in Python or MATLAB code (2020a or 2020b). Corresponding dataset for reproduction should be submitted as a shareable file link on Google Drive), (ii) a ten-minute presentation video with both the slides and the speaker clearly visible and associated PowerPoint slides, and (iii) a 10-15 pages paper following the downloadable template on the IC-SHM website.
The papers and presentation videos will be included in the proceedings published on the IC-SHM 2022 website. shmc.tongji.edu.cn/ICSHM2022
For the promotion of open source in the civil engineering community, participants are requested to make the code for their submission public after the proceeding is published.
All submitted material should be in English.
Prizes
Winners will be selected by the Awards Committee based on the algorithm performance, the video presentation of the results, and the submitted paper (see IC-SHM Evaluation Metrics below).
First prize (1000 USD cash), Second prize (500 USD cash) and Third prize (300 USD cash) will be awarded for each of the project competitions.
All participants will receive certificates.
Publications
The IC-SHM 2022 proceedings will be published online.
The winning teams will be invited to contribute full papers for possible publication in a special issue of the Journal of Smart Structures and Systems. Other participants will have opportunity to contribute a paper to the special issue. All papers will be subject to rigorous review.
Important Dates
December 15, 2022 | Registration, please send the registration form to ic.shm@tongji.edu.cn. |
April 30, 2023 (Extended) | Submit all the items to ic.shm@tongji.edu.cn for each project in which your team is computing as outlined in the submission requirements. |
Before July 15, 2023 | Announcement of competition winners. |
Contact
Website: shmc.tongji.edu.cn/ICSHM2022
E-mail: ic.shm@tongji.edu.cn
Machine learning-based civil infrastructure inspection and monitoring challenge
This year, the competition’s goal is to further extend the frontier field of structural health monitoring technology based on the success of the previous two contests. Driven by the recent advance in computer vision and machine learning fields, many researchers have started working on the applications of such approaches in the field of structural health monitoring. A challenge is that the current structural health assessment methods have yet to fully realize automation, intelligence, real-time monitoring, and risk warning. Moreover, the application and analysis of massive data are still insufficient. The competition this year aims to explore more effective data analysis methods and provide new ideas for students and young researchers in different fields to develop structural health monitoring technology.
The competition consists of three projects: (i) ship trajectory recognition, (ii) computer vision-based dynamic displacement identification, and (iii) data construction for structural health monitoring. The data used in the first project comes from field surveillance video. The second project data comes from the videos of the shaking table test recorded in the lab. The third project data are created from numerical simulations of a three-span continuous bridge under various excitations where experimental data are also available. The following sections describe the details of each competition tasks.
Project 1: Ship Trajectory Recognition
Background
With the improvement of the world transportation industry and the navigation level of the canal in recent years, the tonnage and number of ships have increased significantly. There still exist many bridges that are considered to be key nodes for the interconnection of transportation facilities and hub projects, but with low navigation clearance and poor navigation conditions. Therefore, new requirements for bridge collision avoidance need to be put forward.
At present, image recognition algorithms are developing rapidly and becoming widely used, offering great potential for bridge health monitoring. Therefore, this project challenges participants to develop an automatic ship-collision-warning system for the bridges using image recognition. The image data of ships is collected in the field, as shown in Fig.1.
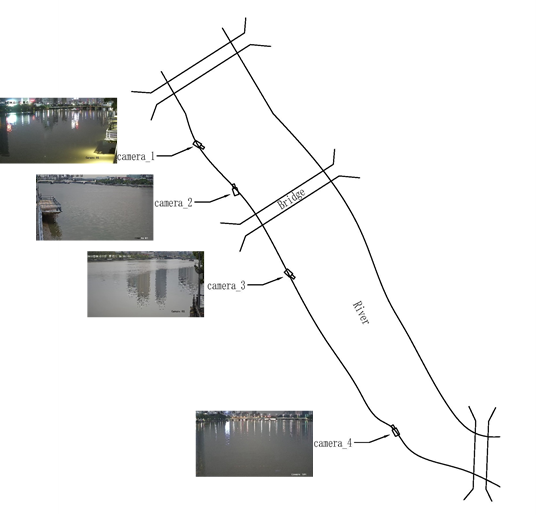
Figure 1. four cameras for ship monitoring
Data description
The data of this project comes from the vessel traffic recorded by the surveillance video for real bridges. The data set includes:
1. Seven groups of videos simultaneously recorded by four cameras under different working conditions are provided for target recognition training. A variety of weather conditions are included:good weather, evening, and rain. The weather conditions of good weather and rain include three ship conditions: two ships, a single big ship, and a single small ship. The weather condition of evening includes one ship condition: a single small ship.
2. The intrinsic matrix and the extrinsic matrix of a camera are used to convert the pixel coordinates into physical coordinates. For each camera, the intrinsic matrix and a group of points with known physical coordinates will be given. Participants can use them to calibrate the extrinsic matrix.
3. More than one thousand images for training are given, including ships with a variety of directions and distances. Participants can mark ships and small boats on these images, and then use them for training.
Project tasks
The goal of this project is to identify the coordinates of the trajectory of the ship. Participants should complete the following two contents:
Task a: Ship target recognition
This task involves target recognition, which requires identifying the type and location of the ship in the video frame. Participants can use neural network or other methods to realize target recognition. More than one thousand images are provided for training. Participants can use these images to create training datasets according to their own needs (only specified images are permitted, and test videos cannot be used for training). They are also encouraged to explore traditional image processing methods to help improve the results.
Task b: Acquisition of the coordinates of the ship trajectory:
This task requires participants to determine the coordinates of the complete ship trajectory. First, the center point of the recognition target is determined in pixel coordinates; then the physical coordinates of the ship are obtained using the intrinsic matrix and the extrinsic matrix. Finally, the complete trajectory of the same ship is determined and reported. Because each camera can only monitor part of the trajectory, participants should design their own matching algorithm to splice together the trajectories of a given ship, and the final result should be a complete list of trajectory points.
Goal & Evaluation
The goal of this project is to recognize the ship target from the video data, obtain the type and position of the ship in the video, and accurately identify the complete ship trajectory.
The committee will evaluate the accuracy of ship trajectory recognition by two metrics: multiple object tracking precision (MOTP) and multiple object tracking accuracy (MOTA).
References
[1] Yuequan Bao, Zhiyi Tang, Hui Li, Yufeng Zhang. Computer vision and deep learning-based data anomaly detection method for structural health monitoring. Structural Health Monitoring, 18(2): 401-421, 2019.
[2] Ye Xia, Limu Chen, Junjie Wang, Limin Sun. Single Shot MultiBox Detector Based Vessel Detection Method and Application for Active Anti-collision Monitoring. Journal of Hunan University: Natural Science. 2020, 47(3): 97-105.
[3] Luo W, Xia Y, He T. Video-Based Identification and Prediction Techniques for Stable Vessel Trajectories in Bridge Areas. Sensors. 2024;24(2):372.
Project 2: Computer Vision-based Dynamic Displacement Measurement
Background
Structural health monitoring (SHM) utilizes state-of-the-art sensing technologies for damage diagnosis and performance evaluation of infrastructures. The data availability of critical structural responses plays an essential role in SHM studies and engineering applications. Most of the quantitative indices are response oriented and configured in a data-driven manner. Generally, the existing contact-type monitoring techniques may be challenged with several practical issues, including the incompatibility between global structural behavior and local installed sensors, the neighboring reference location for displacement measurement, the mass loading effect from sensor installation and wiring, the incomplete observation due to limitations of instrumentation (numbers and locations), and the potential service interruption due to SHM system maintenance.
In structural engineering, displacement is a more straightforward variable in the design and evaluation of safety. Conventional displacement transducers, such as draw-wire sensors and linear variable differential transformers, can only measure the displacement at a few discrete points on the structure. In addition to these techniques, vision-based displacement measurement techniques have also been investigated in displacement monitoring for decades. These monitoring methods may be categorized into target-based and target-free approaches by utilizing algorithms such as feature matching, digital image correlation, optical flow estimation, and phase-based motion magnification.
This task builds off of last year's competition, where the challenge of dynamic displacement estimates were from the synthetic environment. This year, we are using a real structure. A (1/2) RC frame structure has been illustrated, as shown in Figure 2, for computer vision-based dynamic displacement identification [1, 2].

Figure 2. The large-scale RC frame and seismic damage.
Data description
A dynamic experiment was performed under unidirectional earthquake inputs on a 25-ton shaking table with a dimension of 4.0 m×4.0 m at Tongji University. The excitation sources were taken from the North-South (N-S) component of the 1940 Imperial Valley earthquake measured at El Centro station, the N-S component of the 1994 Northridge earthquake measured at the Sylmar station, and a simulated Shanghai wave provided in a seismic design code in Shanghai.
Various monitoring techniques were implemented during the shaking table test, and the placement of representative sensors is shown in Figure 3. The absolute acceleration and relative displacement of every story were conventionally measured using accelerometers and wire-type displacement sensors. An innovative NDI Optotrack Certus high-speed motion capture system was also utilized by placing artificial markers on the desired frame location that were tracked in real time with infrared technology. A SONY HDR-PJ220 camera was placed roughly at 3.0 m in front of the RC frame. A fixed camera (Black Magic Design URSA mini 4K) was placed 8.0 m away from the frame model.
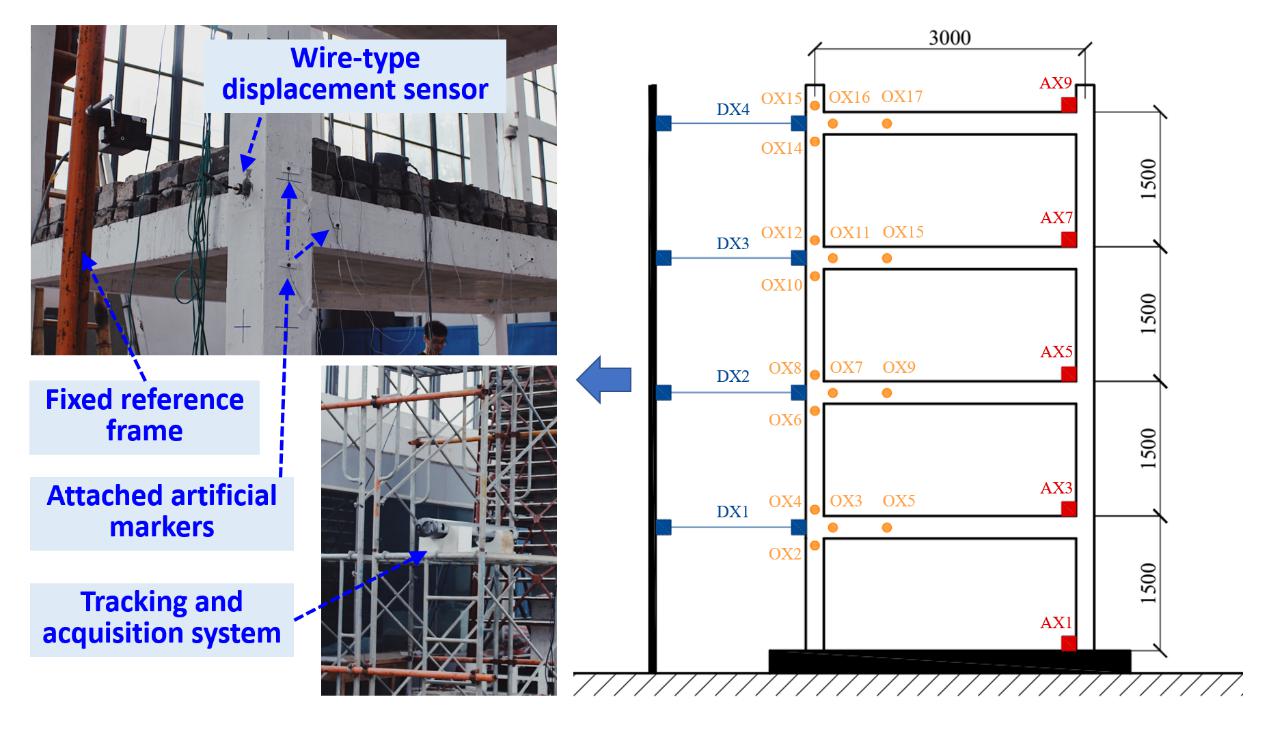
Figure 3. Sensor placement of the shaking table test
Project tasks:
This project consists of two separate tasks. Participants may participate in either or all tasks.
Task a:
Displacement identification, by using feature-based tracking methods or deep learning techniques in a vision-based manner, or further by using vision-based estimation and accelerometer measurements in a data-fusion manner.
Task b:
Modal identification in both frequency domain and time-frequency domain.
Goal & Evaluation
The goal of this project is to estimate structural displacement accurately from video data and vibration data. The project tasks comprise of basic steps of vibration-based SHM that goes from computer vision-based measurements to structural identification. Through this project, the participants will develop, implement, and validate their SHM systems for the building structure.
The committee will first evaluate the displacement estimation for the assigned excitation scenarios. The evaluation uses three metrics: peak value of displacement estimation error, RMS value of displacement estimation error, and modal frequency estimation error by using displacement estimation. The submissions are ranked based on the metrics. Then, for the submissions that obtain the highest score, the code supplied by the participants will be used to verify reproducibility. At the same time, the quality of reports containing the discussions about project tasks is evaluated.
References
[1]Jin Zhao, Fangqiao Hu, Yang Xu, Wangmeng Zuo, Jiwei Zhong, Hui Li. Structure-PoseNet for identification of dense dynamic displacement and three-dimensional poses of structures using a monocular camera. Computer-Aided Civil and Infrastructure Engineering. 2022. 37(6). 704-725.
[2]Jiaqiang Wang, Jin Zhao, Yuwen Liu, Jiazeng Shan. Vision-based displacement and joint rotation tracking of frame structure using feature mix with single consumer-grade camera. Structural Control and Health Monitoring. 2021. 28(12). e2832.
Project 3: Lost Data Reconstruction and Damage Identification
Background
The measured data of a structural health monitoring system might be temporarily abnormal or lost due to the sensor fault and transmission failure. In the 1st International Competition for Structural Health Monitoring, the competitions have involved the anomaly data detection for SHM. Furthermore, the data-driven methodologies are used to reconstruct the lost or anomalous data in data pre-processing, requiring the accuracy in both the time and frequency domains. Because the structural responses involve multi sources and features, lost data recovery is still an open problem in SHM. This project focuses on high-performance recovery of lost data. We will provide a training dataset that includes the structural responses of a numerical bridge, and a testing dataset for data reconstruction and damage identification. The data provided is a complete dataset and participants can mask certain data to train the model and complete the task. Participants are encouraged employing the data-driven deep learning model and physics-informed neural network model to accomplish the tasks.
Data description
The datasets are structural responses of a numerical three-span continuous bridge (see the Figure 4) under various excitations that include the moving vehicle flow, Gaussian noises, and impulse loads (on the structure with/without damage). The finite element model is a beam model with 110 elements and 111 nodes. Only the response in the vertical plane is considered here for simplicity. The displacement, strain, and acceleration of all nodes are included in the training dataset. The testing dataset only involves the responses at the 12 sensor positions, as shown in Figure 4.
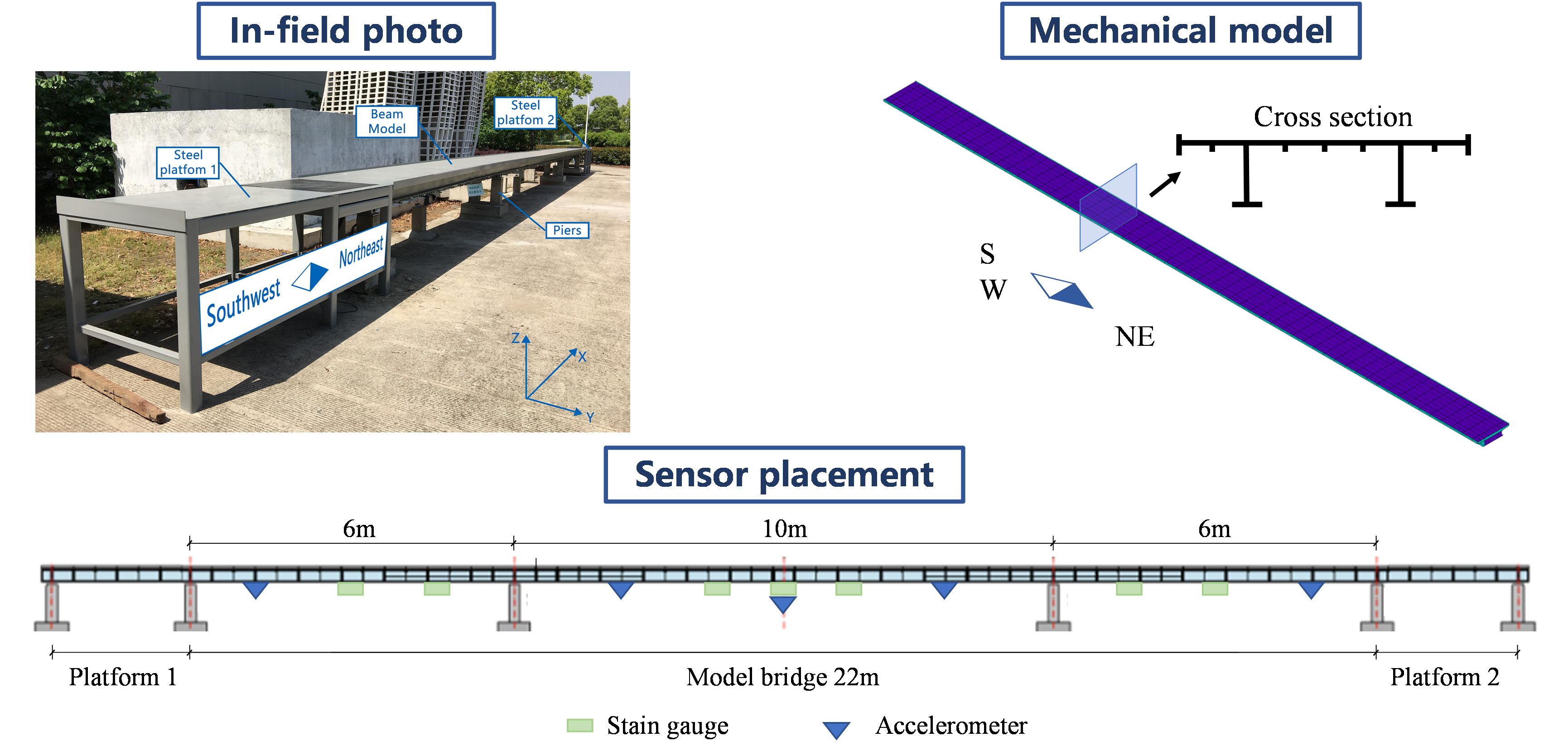
Figure 4 Model layout and sensor placement
Project tasks:
This project consists of two tasks. Participants should accomplish both.
Task a: Data-driven modeling
Build a data-driven model to reconstruct the lost data, and evaluate the accuracy of the model.
a) Four sensors are normally operating all the time while one sensor is assumed broken for the whole time. The lost data should be reconstructed from the data measurement of the other normally operating sensors by building a data-driven model. Each participant should use the trained model to reconstruct the lost data of the broken sensor.
b) Time history data of five sensors are provided. The data of three sensors are assumed lost for the whole time. Each participant needs to reconstruct the lost data.
Task b: Damage identification
Labelled data, that includes the bridge response under varied damage conditions, are provided as the training dataset. Six unlabeled datasets will also be provided as the testing dataset. Each participant needs to use the trained model to identify the damage degrees of the bridge for each testing data.
Goal & Evaluation
A total of 2 different testing datasets are used for different purposes. The participants are provided access to the training dataset for modeling. The testing data will be released after the commencement of the competition. The objective of this project is to accurately reconstruct the lost data with fewer training data and system identification.
For task 1, the committee will first evaluate the data reconstruction performance, considering the mean square error (MSE) of the reconstructed data and the size of the training data (S). The overall score = MSE×S/max_S and a smaller score is better. The submissions are ranked based on the metrics. Then, for the submissions that obtain the highest ranking, the supplied code will be used to verify reproducibility. At the same time, the quality of reports containing the discussions about project tasks is evaluated.
For task 2, the committee will evaluate the damage identification results of the model with accuracy as the metric. Then, for the submissions that obtain the highest score, the supplied code will be used to verify reproducibility. At the same time, the quality of reports containing the discussions about project tasks is evaluated.
References
[1]Lei, X., Sun, L., & Xia, Y. (2021). Lost data reconstruction for structural health monitoring using deep convolutional generative adversarial networks. Structural Health Monitoring, 20(4), 2069-2087.
[2]Li, Y., Ni, P., Sun, L., & Zhu, W. (2022). A convolutional neural network‐based full‐field response reconstruction framework with multitype inputs and outputs. Structural Control and Health Monitoring, e2961.
Project rules
To ensure fairness and objectivity, the competition organizers have instated the following rules:
1. Participants may utilize the provided training data to train their model. In addition, the participants may use any publicly available data if they describe the data in the report. Private datasets may not be used.
2. Any external sources of data and code used should be cited.
3. If deep learning methods are used, the test data should not be utilized in training the model developed by the authors. The authors should not manually annotate the test images.
Submission requirements
Item | Descriptions |
Project 1 | Participants will submit the CSV files of vessel trajectory results by email. They should format the CSV files following the template and samples provided by the committee. The evaluation uses two metrics: multiple object tracking precision (MOTP) and multiple object tracking accuracy (MOTA). The submissions are ranked based on the metrics. |
Project 2 | The participants will submit txt files of the displacement estimation and modal identification results by email. They should format the txt files following the template and samples provided by the committee. The committee will first evaluate the displacement estimation for the assigned excitation scenarios. The evaluation uses three metrics: peak value of displacement estimation error, RMS value of displacement estimation error, and modal frequency estimation error. The submissions are ranked based on the metrics. |
Project 3 | The participants will submit txt files of the results by email. They should format the txt files following the template and samples provided by the committee. The committee will first evaluate the construction performance for the task 1, and identification performance for task 2. The submissions are ranked based on the metrics. |
General requirements | 1. A 10 minute video presentation of proposed method and results, with both the slides and the speaker clearly visible, and associated PowerPoint slides (participants can use Google Drive, Baidu cloud, or other file sharing tools to upload the video presentation and share the downloadable link to the organizing committee) 2. A paper-style report that includes the methods, experiments, and results obtained on the training data. The report should be 10 to 15 pages, 11 pt. single spaced excluding references. 3. Developed code with comments that will reproduce your results (MATLAB code should be tested in MATLAB 2020a or 2020b; Python code should be tested with Python 3.8. 4. All the material necessary to evaluate the model developed by the authors, as well as train the model from scratch, including readme file with instructions and dependencies, and model checkpoints. |
Validation by committee
For the submissions that obtain the highest accuracy, the code supplied by the participants will be used to verify the model performance.
Evaluation metrics
The work submitted by participants will be evaluated by the committee according to “Identification Accuracy”, “Video Presentation”, and “Submitted Paper”. The weights associated with these three parts are shown in Table 1. There will be two stages in the evaluation. The first stage is the preliminary evaluation by the organizing committee. The second stage is the final evaluation by the awards committee.
Table 1. Evaluation Metrics.
Item | Descriptions | Weighting |
Identification Accuracy | The model accuracy score will be determined as follows: For all the projects, the data submitted by participants will be sorted from top to bottom according to the evaluation metrics. The scores of all subtasks account for the same proportion. | 35% |
Video Presentation | The presentation will be evaluated based on: (i) originality and creativity, (ii) organization of content, (iii) oral delivery, (iv) understanding of research methodology, and (v) clarity of artwork (charts, graphs, slides). | 25% |
Submitted Paper | The paper will be evaluated based on: (i) adequacy of literature review, (ii) organization of content, (iii) innovation and creativity, (iv) research methodology, (v) clarity of figures and tables, (vi) technical conclusions, and (vii) language usage. | 40% |
Competition Template
The following file is a word document template for the competition report. Please check and use this format.
版权所有 桥梁健康监测与振动控制研究室
Email: bridge-shm@tongji.edu.cn
地址:上海市四平路1239号同济大学桥梁馆719室 邮编:200092